Table des matières
ToggleUn prototype prometteur
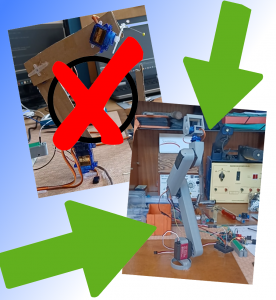
Dans la chronique précédente, j’ai présenté le troisième prototype de mon robot fait maison.
Dans cette chronique ” Enfin un prototype qui à de l’avenir ! ” voici le résultat de beaucoup d’heures de travail.
Le mouvement du robot prototype est censé être fluide en faisant un demi-cercle sur 180 °.
Mais actuellement il se déplace pas du tout de manière fluide et fait beaucoup d’à-coups.
Pourquoi ?
Ceci est dû au fait que la pile est qui alimente le moteur est un simple accu 18650, de ce fait, il y a un décalage entre la commande de l’Arduino et la rotation du moteur.
Le moteur demande une trop grande intensité d’un coup pour repartir dans l’autre sens, c’est comme si une voiture essaie d’avancer sur de la glace, les roues patinent et la voiture n’avance pas ou très peu.
Comme en voiture dans ces cas-là, il faut partir plus doucement.
C’est pourquoi j’ai changé mon code et réalisé des paliers pour faire partir le moteur de manière progressive.
De ce fait, le moteur appelle progressivement du courant a l’accu 18650.
Mais pourquoi avoir choisi un accu au lithium ion ?
Je fais ici une petite parenthèse sur les accus lithium ion car je trouve cette technologie très intéressante et facile d’accès.
Les accus lithium ions sont trouvable partout, dans des ordinateurs
portables, des vieux aspirateurs robots, ou tout autre appareil rechargeable. Il est possible de les trouver en neuf également.
Il y a quantité de chimie possible selon les besoins, l’intensité nécessaire, l’autonomie, etc…
Sur -> ce lien <- vous pouvez trouver les informations de bases et très intéressante sur les piles 18650.
Pour ma part, j’ai choisi des accus au nickel de marque Samsung pour l’alimentation de mon robot.
Enfin un prototype qui à de l'avenir !
En voyant la vidéo de droite, vous pouvez vous demander si le robot voit le tournevis et se décide à le prendre dès que je le pose.
Non.
C’est en réalité un programme pré-enregistré dans l’Arduino qui descend, puis ferme la pince, remonte jusqu’au pot à crayons et ouvre la pince.
Une fois le tout synchronisé, le robot commence à avoir un semblant de vivant.
Je procède toujours par étape, “step by step” comme disait Jeff Bezos.
Dans la suite de cette chronique, je compte ajouter un socle pour permettre au robot d’avoir une plus grande plage de travail et de manière plus stable qu’un moteur collé à la colle chaude.
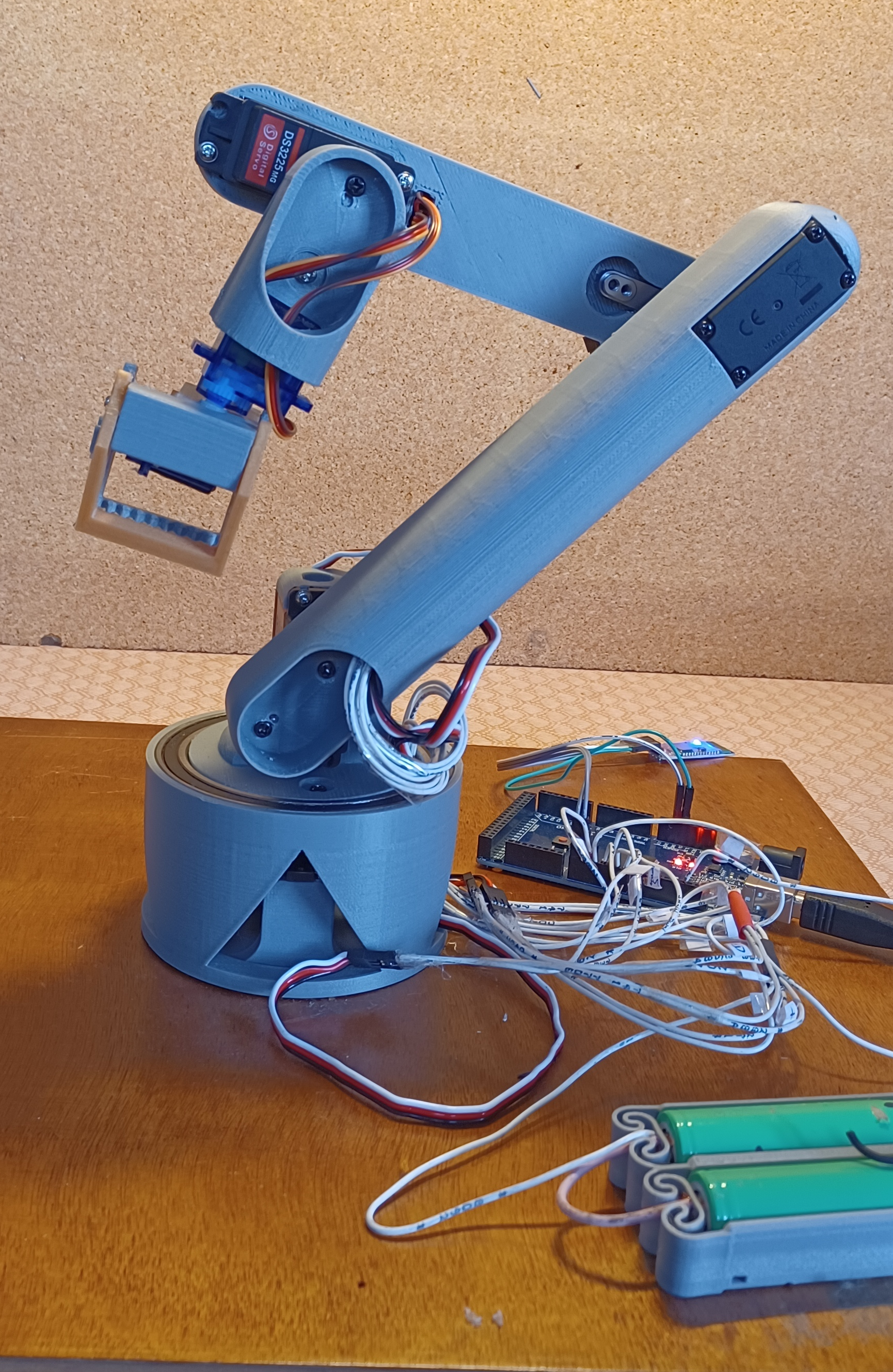
Un tout nouveau socle pour mon robot prototype
Voici donc mon bras avec un merveilleux socle !
J’ai placé des triangles dans le socle pour économiser les plastiques imprimés.
Je posterais dans une prochaine chronique du robot, tous les prototypes de pièces plastiques réalisés pour avoir construit ce bras robotique, ce qui permettra de se rendre compte qu’il m’a fallu beaucoup d’essais pour arriver au résultat que vous pouvez trouver en boutique.
Je réalise toutes mes pièces moi-même, ce qui me permet de faire exactement ce que je veux et de toute de suite modifier la pièce si celle-ci ne correspond pas à mes attentes.
En effet, jai une imprimante 3D de marque Wanhao duplicator 12.
Une imprimante facile à monter, accessible et qui n’est jamais tomber en panne jusqu’à présent.
Je remarque plusieurs problèmes sur le robot :
– Il fait des à-coups fréquents et assez violent qui risquent de casser les plastiques.
– Le seul moyen de piloter mon robot est par l’intermédiaire d’un ordinateur avec Arduino.
Je commence donc par m’interroger sur les à-coups. J’ai cherché longtemps avant de me rendre compte que les pins, facilement
démontables, font des micros-coupures d’alimentations et de signaux vers les moteurs.
Je décide donc de souder les fils en utilisant du cuivre d’un faisceaux électrique trouvé dans la nature (MyElectronicKit se veut le plus écologique possible).
Je passe également à deux accus lithium ion plutôt qu’un seul pour avoir une meilleure autonomie et une tension plus élevée afin d’avoir assez de puissance pour les moteurs.
J’obtiens un beau faisceau tout blanc que je dois répertorier pour ne pas mélanger les fils des moteurs.
En effet j’ai 6 moteurs dont 3 fils par moteur.
Ce qui donne 18 fils en bas du socle à brancher dans le bon ordre.
Maintenant je dois régler le problème de la commande.
Je réalise donc une application facilement grâce à MIT App Inventor.
Un fond blanc, des boutons blanc, simple, basique mais ça fonctionne.
Chaque bouton commande le sens de chaque moteur, par exemple : “descendre coude” fait une rotation du troisième moteur en partant du bas, ce qui fait tourner le coude.
Le seul problème avec ce mode d’application c’est que seul les smartphone Android peuvent télécharger l’application.
Mais je verrais ce problème plus tard.
Dans la chronique du robot suivante, j’expliquerais ce qu’et devenu ce prototype et comment je l’ai améliorer.
J’espère que cette chronique ” Enfin un prototype qui à de l’avenir ! ” de My_Electronic_Kit vous auras plus ! N’hésitez pas à me le faire savoir dans les commentaires.
Merci