Table des matières
ToggleUn petit bras pour de grandes ambitions
Je réalise ce concept le 4 juillet 2022.
Dans cet article je présente les premiers prototypes de My_Electronic_Kit que je réalise pour construire mon bras robotique.
Si vous vous demandez d’où vient ce bras très moche, vous pouvez vous reporter à l’épisode 1 des chroniques du robot qui explique comment j’en suis arrivé là.
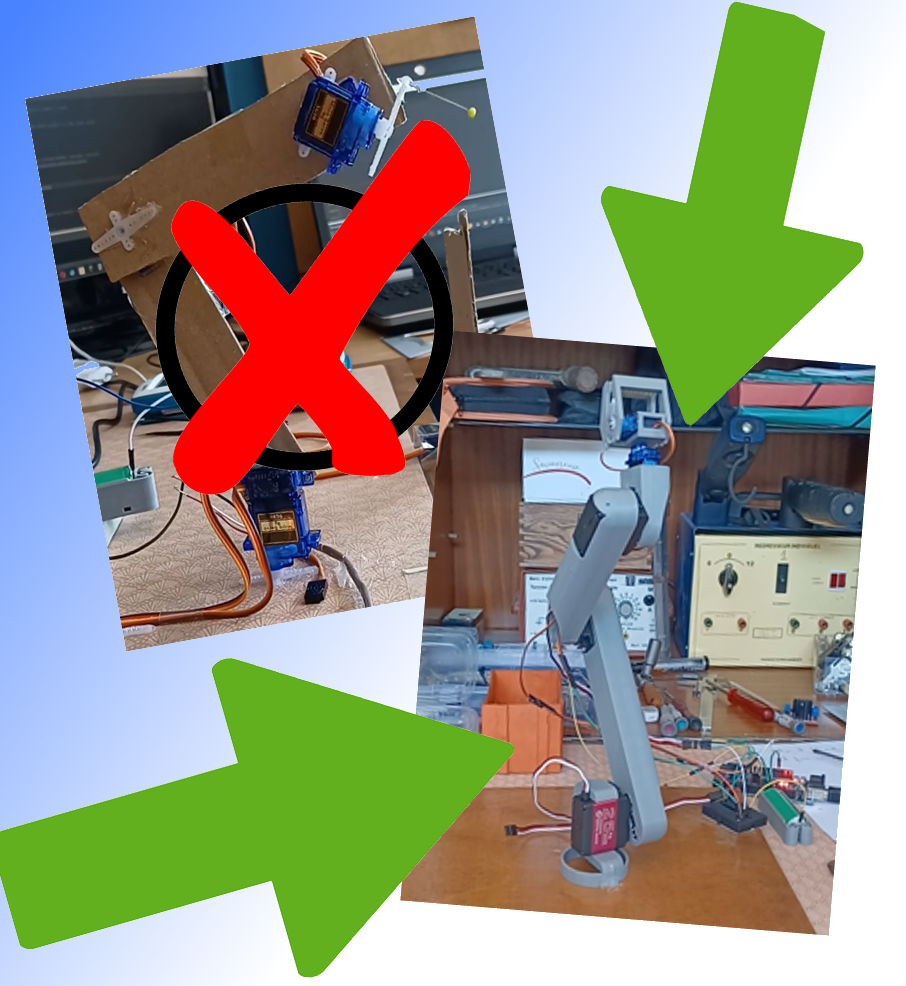
Pour le moment, je me trouve avec mon premier prototype en carton et des fils absolument partout.
À partir de cette base, je décide d’améliorer le tout, petit à petit.
Je commence par améliorer le corps du robot. Mais je souhaite surtout garder sa petite taille pour pouvoir le transporter mais aussi pour ne pas avoir un robot encombrant.
Un deuxième prototype avec un léger problème
Voici, sur la vidéo de gauche, le bras en carton mais de façon améliorée.
Pour ce deuxième prototype je réalise un corps imprimé avec mon imprimante 3D et dessiné avec fusion360. Le corps de ce bras est fait de sorte que je n’ai aucun support lors de l’impression. Comment ?
Les imprimantes à filament peuvent imprimer une pièce penchée de 45° sans support. Ce qui m’a permis d’imprimer plusieurs tubes que montre la vidéo.
Pourquoi plusieurs ?
Parce que je ne réussis pas du premier coup mes pièces. Donc je redessine et réimprime encore jusqu’à avoir la pièce parfaite.
J’imprime ce bras avec 12 centimètres en hauteur d’impression.
Mais j’ai oublié un léger détails avant de commencer mes prototypes.
Je viens d’imprimer tout un bras en plastique sans avoir calculé la force nécessaire aux servomoteurs pour soulever des charges.
Je me retrouve donc avec un bras très léger mais incapable de soulever sa propre masse (On voit dans la vidéo qu’il n’arrive pas à bien bouger).
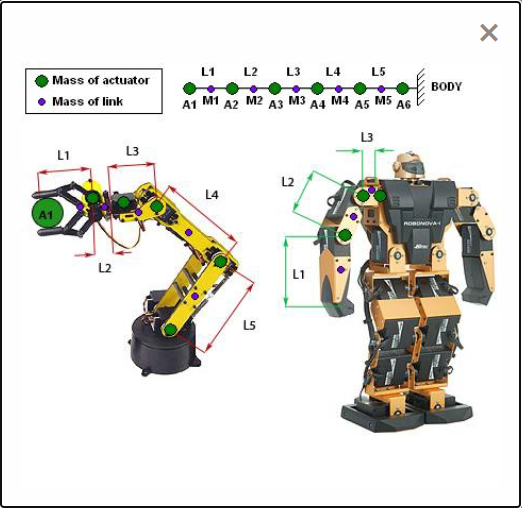
L’image de droite correspond aux forces à mesurer avant de choisir ces moteurs. Ce calcul peut être aidé grâce au site disponible ici :
Calculateur de couple de bras robotique.
Je me suis également aidé d’un convertisseur pour bien comprendre ce que je mesurais, voici le site pour convertir :
(Je précise que les robots dans l’image de droite ne sont pas mes robots)
À la suite de nombreux calculs pour définir mes forces, je conçois un nouveau prototype beaucoup plus travaillé et, cette fois, qui peut soulever sont propre poids et même soulever des charges ! Voici le nouveau robot en question :
Un nouveau prototype plutôt prometteur
Voici mon troisième prototype.
Ce coup-ci, il peut soulever sa propre masse et même soulever une charge.
Je ne test pas tout de suite la charge maximale car je veux déjà le faire fonctionner correctement et on peut voir dans la vidéo à gauche qu’il fait beaucoup d’à-coups.
Dans la Chronique du robot suivante, je vous montrerais pourquoi ce robot fait plein d’à-coups et comment j’ai résolu ces problèmes.
J’espère que cette chronique des premiers prototypes de My_Electronic_Kit vous aura plus ! N’hésitez pas à me le faire savoir dans les commentaires. Je poste une nouvelle chronique du robot 1 fois par mois.
Merci.


Ping : Enfin un prototype qui à de l'avenir ! Un robot créer par un étudiant.