Table des matières
ToggleTout a commencé par un constat : il y a des déchets partout !
En marchant sur les chemins, en regardant sur le bord des routes, dans la nature et dans les villes, je vois des déchets partout. Je ne m’étonne pas qu’il existe un septième continent de plastique dans les océans…
Plutôt que de contempler l’œuvre de l’homme, j’ai décidé d’agir.
Le 01 avril, et ce n’est pas une blague, je publie ma première vidéo.
Le point de départ d’une grande aventure. On peut voir un robot construit par mes soins, qui se déplace, ramasse des déchets, les stocks dans son ventre pour les déposer plus loin, dans une remorque par exemple où ils seront ensuite traités.

Oui, je me suis inspiré du film Wall-E de Andrew Stanton, que j’ai revu plusieurs fois tellement je trouve l’idée génial (le film, pas Andrew).
Mon robot, qui n’a pas de nom d’ailleurs, se pilote via une manette de Xbox modifié, les valeurs des joysticks sont pris indépendamment et font varier les différents moteur.
J’utilise des gros drivers électroniques pour la puissance des roues. En effet, il est construit sur une base de fauteuil roulant. Rassurez-vous, je n’ai pas agressé de mamie sans défense pour avoir ce fauteuil. Tout ça pour dire qu’il peut porter 100 Kilos et donc en tirer bien plus si c’est sur roulette.
Comme vous pouvez le voir dans la vidéo, le bras est fait maison. Tellement fait maison qu’il s’agit de cadre publicitaire rouge, de pièce de Mécano, d’un câble téléphonique pour la pince et de brique de lait pour faire les poulies.
Un nouveau bras pour Wall-E
J’ai donc réfléchi à un nouveau bras. Et voici le résultat.
Bien sûr, mon budget étant toujours limité au prix d’un paquet de pate Eco+, je réalise malgré ça un bras fonctionnel avec des béquilles, des pièces de vélos et des moteurs d’essui glace de 306. Malgré la diversité des origines de ces pièces le bras présente de nombreux inconvénients:
– L’intensité n’est pas régulée en fonction de la charge.
– Impossible de faire une pince correcte.
– Il est aussi précis qu’un rhinocéros, etc..
Le financement
Pour avoir un robot fiable, précis et présentable à poser sur mon fauteuil roulant, je compte mettre un bras robotique industriel déclassé. Très vite, je m’aperçois que j’ai besoin de fond pour avoir cette gamme de robot. Même après avoir épluché les sites de robotique et avoir reçu des devis qui blanchirais Mickael Jackson, je ne pouvais pas me permettre d’acheter un robot industriel.
04.07.22 / Un petit bras pour de grandes ambitions
Un an après l’idée du robot révolutionnaire, j’ai désormais acquis beaucoup de connaissance en électronique, robotique et en programmation Arduino C.
Je décide donc de créer un bras robotique qui me permettra de financer l’avancée du robot nettoyeur de la planète terre.
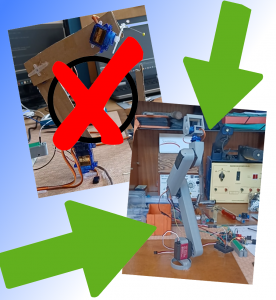
Je commence par ce… concept ! En carton (budget eco+ toujours) et je travail dessus pour améliorer chaque jour un peut plus le robot.
Vous remarquerez l’habile manœuvre programmée !
Mes premiers tests ne sont pas concluant, pas du tout.
Et encore aujourd’hui je continue d’améliorer ce concept en résolvant problèmes après problèmes.
Mais je vous laisse lire l’avancée du projet via mes chroniques disponible dans la rubrique : “Chroniques du robot”.
Je publie une chronique par mois au minimum. S’il y a vraiment beaucoup d’activité sur l’avancée du projet, alors je redoublerais d’effort pour en publier d’avantage.
Si vous souhaitez me soutenir financièrement, n’hésitez pas à visiter ma boutique en ligne !
J’espère que cette chronique vous aura plu !